ROVID [Jul 2020 – May 2021]
RObot for VIrus Disinfection
The ROVID project aims the development of a robotic solution that will serve as a disinfectant tool to be used in shared indoor spaces. It is expected that this project results in a mobile, autonomous solution with an intelligent disinfection system capable of inactivating SARS-CoV-2 virus in indoor spaces. This will be possible through the action of two robots: one equipped with Ultraviolet type C light system and the other with a disinfectant nebulizer system.
Project webpage: https://www.idmind.pt/rovid/

DE-ENIGMA [Fev 2016 – Aug 2019]
Playfully Empowering Autistic Children
The project aims to create and evaluate the effectiveness of robot-based technology as an integral part of the psychoeducational therapy for children with ASC.
The Consortium is formed by five academic research institutions, ASC experts and one SME.
IDMind is leading the overall system integration and validation.
DE-ENIGMA is a collaborative project under EU H2020
Project webpage: http://de-enigma.eu/

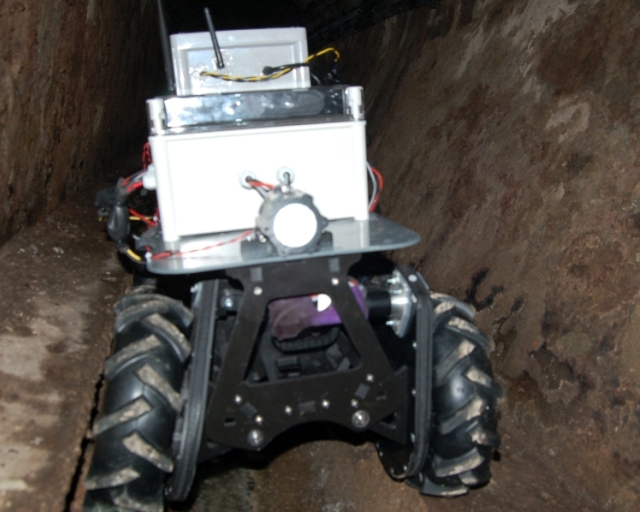
SIAR [Jan 2016 – Sep 2018]
Sewer Inspection Autonomous Robot
The SIAR project is developing a fully autonomous ground robot able to autonomously navigate and inspect the sewage system with a minimal human intervention, and with the possibility of manually controlling the vehicle or the sensor payload when required.
The SIAR consortium is leaded by IDMind and includes also two universities
IDMind is leading the construction of the locomotion platform.
The project is being developed in the scope of the ECHORD++ (FP7 funding)
Project webpage: http://siar.idmind.pt/
SQUIRREL [Fev 2014 – Jan 2018]
Project SQUIRREL proposes to address the issue of clutter for mobile manipulation. The research is being driven by a cleaning scenario where a robot navigates in a cluttered environment and collects objects to be stowed away in designated places. The developed system will be evaluated over a toy problem scenario: cleaning up a child’s room. Where the toys scattered on the floor represent the clutter, and their variable sizes and arrangements exhibit all the rich complexity of the real world needed to validate the project approach. At the same time, using sturdy and lightweight objects and keeping manipulation at floor level alleviates hardware requirements and allows learning from failures.
The Consortium is formed by six academic research institutions, three industrial partners and one kindergarden.
Project webpage: http://www.squirrel-project.eu/

MOnarCH [Fev 2013 – Jan 2016]
Multi-Robot Cognitive Systems Operating in Hospitals
The MOnarCH project focused on social robotics using networked heterogeneous robots and sensors to interact with children, staff, and visitors, engaging in edutainment activities in the pediatric infirmary at the Portuguese Oncology Institute at Lisbon (IPOL), Portugal.
The Consortium was formed by five academic research institutions, two SMEs and one hospital.
IDMind leaded the robot design and construction work package.
MOnarCH was a collaborative project under FP7-ICT-2011.2.1
Project webpage: http://monarch-fp7.eu/




SocialRobot [Nov 2011 – Oct 2015]
The SocialRobot project was funded within the FP7, Industry-Academia Partnerships and Pathways (IAPP). Through knowledge transfer and creation of strategic synergies between the partners the project aimed the development of an integrated robotic and ICT-based care&wellness services system to support the elderly to remain active and independent in their preferred environment.
Participants:
SMEs – IDMind (Portugal), Citard Services (Cyprus)
Academia – Universidade de Coimbra (Portugal, Coordinator), University of Cyprus (Cyprus)
Project webpage: http://mrl.isr.uc.pt/projects/socialrobot/



FROG: Fun Robotic Outdoor Guide [Oct 2011 – Oct 2014]
Development of an outdoor guide robot with a winning personality and behaviours to engage tourists in a fun exploration of outdoor attractions.
Involved Partners: University of Amsterdam (UvA), IDMind (IDM), Universidad Pablo de Olavide (UPO), Imperial College of Science Technology and Medicine (ICL), University of Twente (UT)
Research Interests: People detection, tracking and body pose recognition (UvA); Outdoor navigation in crowded scenarios (UPO); Robot platform development and system integration (IDM); Vision-based human tracking and affective behaviour understanding (ICL); Human robot interaction strategies and usability evaluation (UT).
Collaborative project under the FP7-ICT-2011.2.1 Cognitive Systems and Robotics (a), (d) area of activity.




ROBOSWARM [Nov 2006 – Apr 2009]
knowledge environment for interacting ROBOt SWARMs
The aim of the ROBOSWARM project was in the development of an open knowledge environment for self-configurable, self-learning and robust robot swarms usable in domestic and public area applications – cleaning, patrolling, semantic mapping, escorting and other. This project was supported within the IST priority of the Sixth Framework.
Partners: IDMind (Portugal), Fatronik (Spain), ELIKO (Estonia), TUT (Estonia), Inria (France), HUT (Finland), U. of Oulu (Finland), KTH (Sweden), UGDIST (Italy)
IDMind Role: leader of system integration task




RAPOSA [Mar 2003 – Mar 2005]
Semi-Autonomous Search & Rescue Robot
The project goal was the construction of a Search and Rescue (SaR) robot, designed to operate in environments hostile to human presence or otherwise not reachable, like those resulting from an earthquake.
Partnership project supported by Agencia de Inovacao (ADI) through the POSI program, envolving the following partners: IDMind (project leader); Instituto Superior Tecnico (IST/ISR); Regimento de Sapadores Bombeiros de Lisboa (RSBL); University of South Florida – Perceptual Robotics Laboratory (USF/PRL).
IDMind role: mechanics, electronics and embedded systems
This project was among the four finalists for the “EURON 2006 Technology Transfer Award”.



